lua
编码
1024
NAND
arm开发
正则表达式
固定解
hbase
压力测试
小目标
免责声明
逆向
dxf
博通蓝牙vendor
ROBOGUIDE
学习方法
内联函数
Junit常用注解
图像视图
dw网页设计
Mission Planner
2024/4/13 12:23:32
(10)(10.8) 固件下载
文章目录
前言
10.8.1 固件
10.8.2 Bootloader
10.8.3 APM2.x Autopilot
10.8.4 许可证
10.8.5 安全 前言
固件服务器(firmware server)可提供所有飞行器的最新固件。其中包括:
CopterPlaneRoverAntennaTrackerSub
本页提供了一些被视为&quo…

(10)(10.9) 术语表(一)
文章目录
前言
1 2.4Ghz
2 AGL
3 AHRS
4 APM
5 AMA
6 Arduino
7 APM (AutoPilot Mega)
8 ATC
9 Copter
10 Plane
11 Rover
12 BEC
13 Bootloader
14 COA
15 DCM
16 Eagle file
17 ESC
18 Firmware
19 FPV
20 FTDI 前言
!Note
术语表未编入索…

(7)(7.4) 集结航点
文章目录
7.4.1 概述
7.4.2 设置集结航点
7.4.3 飞行示例
7.4.4 附录 7.4.1 概述
通常情况下,当固定翼或旋翼飞机进入"返回发射"(Return to Launch (RTL))模式(通常由自动驾驶仪失控保护触发)(failsafe)时,默认行为…

(7)(7.1) 使用航点和事件规划任务
文章目录
前言
7.1.1 设置Home位置
7.1.2 视频:制作并保存多路点任务
7.1.3 视频:加载已保存的多航点任务
7.1.4 使用说明
7.1.5 提示
7.1.6 自动网格
7.1.7 任务指令
7.1.8 任务结束
7.1.9 任务重置
7.1.10 MIS_OPTIONS
7.1.11 任务再出发 …
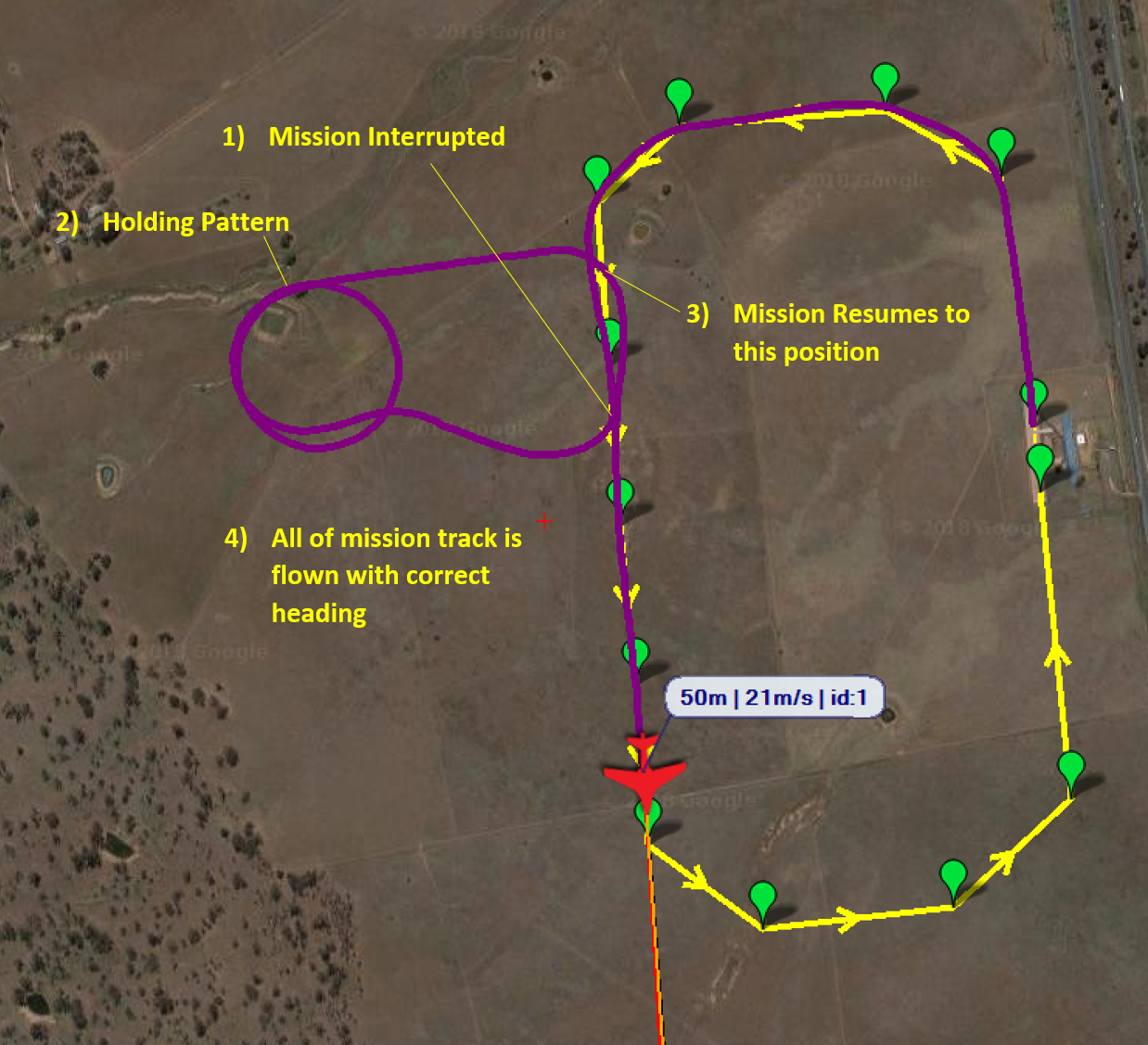
(6)(6.6) 恢复任务回放
文章目录
前言
6.6.1 配置
6.6.2 工作原理
6.6.3 局限性 前言
本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。
!Note
从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。 在某些应用或运行区域,为了消除冲突…
(6)(6.3) 自动任务中的相机控制
文章目录
前言
6.3.1 概述
6.3.2 自动任务类型
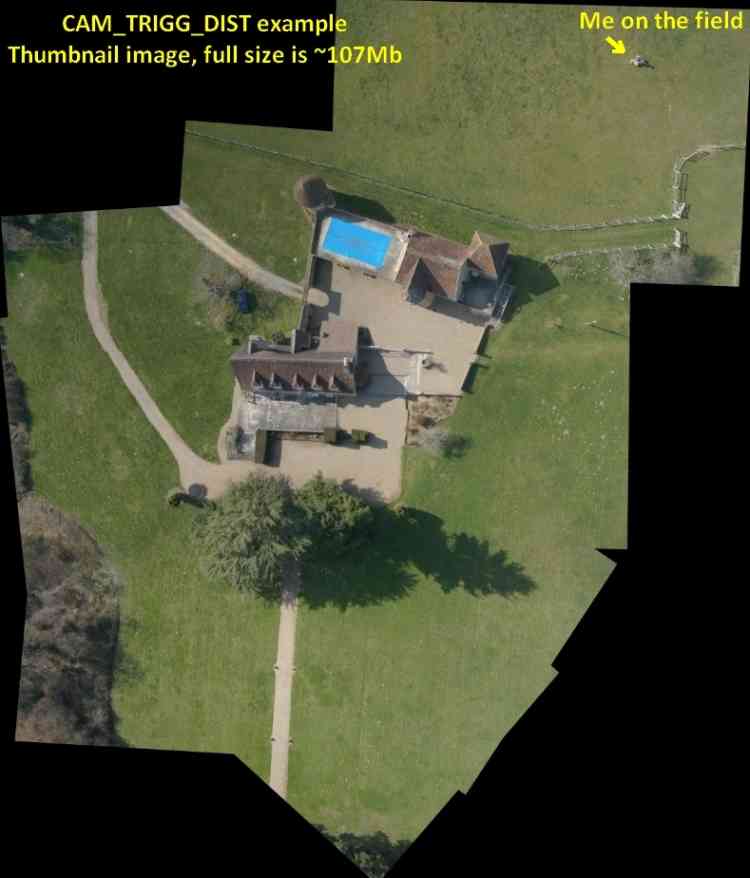
6.3.3 创建合成图像 前言
本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal ha…
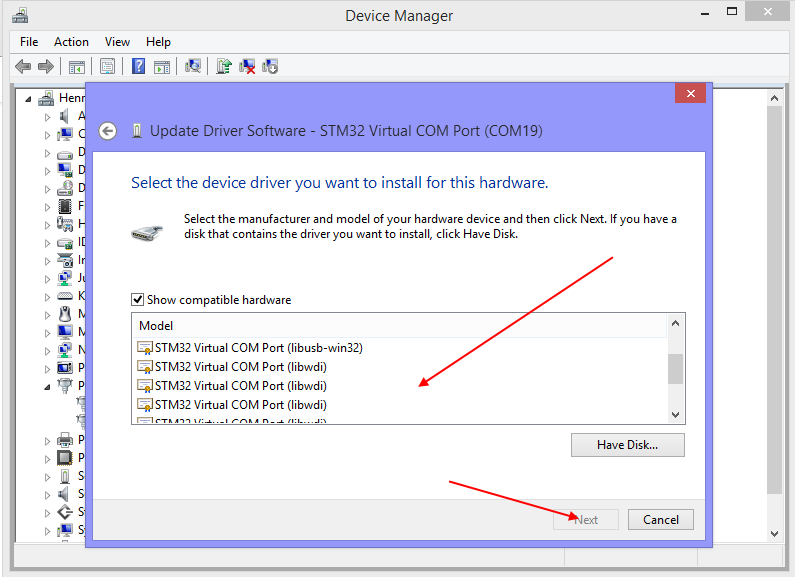
(6)(6.3) 复合连接的故障处理
文章目录
6.3 复合连接的故障处理
6.4 相关话题 6.3 复合连接的故障处理
带有 F7 或 H7 处理器并有 CAN 接口的自动驾驶仪使用的固件提供两个 USB 接口。一个用于正常的 MAVLink 连接,一个用于 SLCAN 串行连接到 CAN 接口进行配置和固件更新。这被称为复合型 USB…
(7)(7.3) 自动任务中的相机控制
文章目录 前言
7.3.1 概述
7.3.2 自动任务类型
7.3.3 创建合成图像 前言
本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal hav…

(6)(6.2) 任务命令
文章目录 前言
6.2.1 概述
6.2.2 导航命令
6.2.3 条件命令
6.2.4 DO命令 前言
本文介绍了 Copter、Plane 和 Rover 切换到自动模式时支持的任务指令。
!Warning
这是一项正在进行中的工作,尚未经过全面审核。有关 Copter 的更佳列表,请…
(7)(7.6) 恢复任务回放
文章目录 前言
7.6.1 配置
7.6.2 工作原理
7.6.3 局限性 前言
本页介绍了什么是"任务继续时后退"功能以及如何使用该功能。
!Note
从 4.1 版起,Plane、Copter 和 Rover 均可使用此功能。 在某些应用或运行区域,为了消除冲突&…